




知情郎·眼|
侃透天下专利事儿
一家深圳的机器人企业要上港交所IPO。
这公司叫精锋医疗,专做手术机器人,仿达芬奇系列,业务很高精尖。
据人家说,精锋多孔手术机器人在部分参数上已超越了进口产品达芬奇手术机器人。
鉴于美国直觉外科公司旗下达芬奇手术机器人在国内的销售单价达数千万元人民币,若公司产品真如新闻稿里那般名副其实,能完成较好的国产替代,自然前景无限。

达芬奇手术机器人,牛!
毕竟,达芬奇手术机器人如雷贯耳的名声,连知情郎这个纯外行都听过。
这公司在申报材料里明确表示,公司中国的专利授权及专利申请数量均在中国手术机器人公司中排名第一。
01科普下手术机器人
很多人估计都不了解何谓手术机器人,先科普下概念。
传统的外科手术是医生使用医疗器械直接对病人的身体病灶进行切除、缝合等操作,从而达到除去病变组织、修复损伤、移植器官、改善机能和形态等目的。
由于一些传统开放式手术的创面大、伤口长、人体肌肉等组织需要被切断,从而增加了患者的出血量和感染及术后并发症的风险,患者需要承受巨大的痛苦。
而借助手术机器人完成的外科手术可以很大程度地缩小创口、提高手术精确度、缩短手术时间,从而减少患者痛苦并降低手术风险,这是手术机器人出现的最重要目的。
当下,风靡外科界的手术机器人是达芬奇手术机器人,它是一种腔镜手术机器人。
达芬奇机器人手术系统以麻省理工学院(原名斯坦福研究学院)研发的机器人外科手术技术为基础。

IntuitiveSurgical随后与IBM、麻省理工学院和Heartport公司联手对该系统进行了进一步开发。FDA已经批准将达芬奇机器人手术系统用于成人和儿童的普通外科、胸外科、泌尿外科、妇产科、头颈外科以及心脏手术。
达芬奇外科手术系统是一种高级机器人平台,其设计的理念是通过使用微创的方法,实施复杂的外科手术。
一套达芬奇手术机器人售价要2000万元。当然,这只是机器人本身的价格,还不包括它的服务费用和昂贵的耗材——机械臂。
自2006年第一台“达芬奇”引进中国大陆以来,目前共进口了130余台,完成手术量超过10余万例,且全世界单机手术量最高的前八家医院均在中国。
从数据看,我国对达芬奇手术机器人的需求越来越高,大大小小医院几乎都要具备一台达芬奇手术机器人。
芬奇旗下的多孔、单孔等系列机器人产品在腹腔镜手术中有着大量的实战案例,其稳定性、高效性和精巧程度背后是几十年的不断研发。
02达芬奇机器人的构成
达芬奇机器人单从外表来看就是装备精良,由外科医生控制台、床旁机械臂系统、成像系统三部分组成。

外科医生控制台
主刀医生坐在控制台中,位于手术室无菌区之外,使用双手(通过操作两个主控制器)及脚(通过脚踏板)来控制器械和一个三维高清内窥镜。正如在立体目镜中看到的那样,手术器械尖端与外科医生的双手同步运动。
床旁机械臂系统
床旁机械臂系统(PatientCart)是外科手术机器人的操作部件,其主要功能是为器械臂和摄像臂提供支撑。助手医生在无菌区内的床旁机械臂系统边工作,负责更换器械和内窥镜,协助主刀医生完成手术。为了确保患者安全,助手医生比主刀医生对于床旁机械臂系统的运动具有更高优先控制权。
成像系统
成像系统(VideoCart)内装有外科手术机器人的核心处理器以及图象处理设备,在手术过程中位于无菌区外,可由巡回护士操作,并可放置各类辅助手术设备。外科手术机器人的内窥镜为高分辨率三维(3D)镜头,对手术视野具有10倍以上的放大倍数,能为主刀医生带来患者体腔内三维立体高清影像,使主刀医生较普通腹腔镜手术更能把握操作距离,更能辨认解剖结构,提升了手术精确度。
03精锋医疗奔着IPO去
19日,深圳市精锋医疗科技股份有限公司向港交所提交上市申请书,摩根士丹利、中金公司和花旗担任联席保荐人。
知情郎翻阅了下招股书里的内容。
发现,公司很年轻,成立才5年,2017年成立,2022年就要上市了。
且,这公司专注于商业化的手术机器人领域。
根据弗若斯特沙利文的资料,该公司已启动多孔及单孔腔镜手术机器人的关键性临床试验,是中国首家、全球仅有的两家公司之一。
该公司已完成精锋®多孔腔镜手术机器人MP1000及精锋®单孔腔镜手术机器人SP1000的设计及主要研发。
MP1000及SP1000均具备通过绿色通道进行国家药监局有关创新医疗器械的快速审查资格。
MP1000是该公司的核心产品,SP1000是其关键产品。
这公司的核心就是MP1000、SP1000,所以,对投资人而言,大家最关心的也是它们的信息,到底有多少技术含金量,牛逼在哪?
公司自主开发的多孔及单孔腔镜手术机器人相辅相成,根据不同外科手术的临床需要,为外科医生提供广泛选择。
多孔腔镜手术机器人装备了多种最新的机器人技术,能够执行各种专业的复杂外科手术。单孔腔镜手术机器人能够以较少伤口的小切口进入狭窄的工作空间,适合需要进行精细灵巧操作的外科手术。
看看精锋医疗对自家产品的介绍:
04MP1000
公司于2021年12月完成MP1000用于泌尿外科手术的注册临床试验。国家药监局于2022年1月受理注册申请。

MP1000为外科医生提供精准及简便的操作,使外科医生能够为患者提供优质手术。
于2021年8月开启用于妇科手术的临床试验,于2022年1月开启用于普外科及胸外科手术的临床试验。根据弗若斯特沙利文的资料,是唯一一家将T4晚期癌纳入在中国进行的泌尿外科关键临床试验的中国公司。
例如,郑州大学第一附属医院一位外科医生运用MP1000成功为一名被诊断患有晚期前列腺癌的患者进行了前列腺切除术。该患者由于肿瘤与周边病灶紧密黏连,故手术难度大。外科医生利用我们的MP1000成功切除了前列腺及淋巴结且切缘阴性,有效避免了骨盆底血管出血和直肠破裂。
此外,根据弗若斯特沙利文的资料,中国人民解放军总医院一位外科医生使用我们的MP1000,成功为一名有右肾肿瘤的患者进行腹膜后肾部分切除术,期间热缺血时间只有7分钟,远远短于全球机器人辅助手术的平均热缺血时长。
05SP1000
公司于2021年10月启动SP1000在妇科手术的注册临床试验。
根据弗若斯特沙利文的资料,SP1000为中国首个进入妇科手术关键性临床试验阶段的单孔手术机器人。

单孔腔镜手术机器人代表微创手术的发展趋势,一直是全球领先的手术机器人公司的研究重点之一。
SP1000的成功案例,国内首例单孔机器人辅助下全子宫切除术。
根据公开资料,于2022年3月,四川大学华西第二医院一名外科医生使用我们的SP1000成功完成国内首例单孔机器人全子宫切除术。该患者为宫颈重度癌前病变的女性,主刀医生于脐正中线行2.5厘米小纵切口,通过SP1000在遥操作下顺利实施全子宫切除术。术中患者生命体征平稳,手术操作流畅,出血量仅10毫升,术后缝合患者脐部伤口,大小仅2.6厘米左右。
为何研发单孔腔镜手术机器人?
公司表示,微创手术凭借多种临床优势,例如侵入性低、手术伤口最小、恢复更快及术后并发症较少,成为愈来愈常见和首选的手术方法。
随着新技术(尤其是针对手术机器人的创新技术)的出现,机器人辅助的微创手术凭借其治疗效果优于开放手术及传统微创手术而成为趋势。
除了传统微创手术带来的所有好处外,机器人辅助的微创手术还可以通过提供三维高清的解剖学影像、优化器械运动、过滤人手固有的颤抖并降低外科医生的疲劳感,大大提高外科医生的手术能力。
与开放手术及传统微创手术相比,机器人辅助的微创手术赋能外科医生提供更一致及更精准的手术方式,为患者提供优质的手术。
为进一步减少外科手术的侵入性,手术机器人的研发重点从使用多孔手术机器人进行多切口微创手术转向使用单孔手术机器人进行单切口微创手术,再到利用人体自然腔道进行机器人辅助的微创手术。
06中国手术机器人企业竞争力几何?
一句话,惨不忍睹,在手术机器人中高端领域,国产货没资格上台!
根据弗若斯特沙利文的资料,作为全球手术机器人的最大细分市场,2020年中国机器人辅助腔镜手术占腔镜手术总数的渗透率为0.5%,远低于美国13.3%的渗透率。
截至2021年9月30日,美国腔镜手术机器人的装机量为4,005台,而中国仅有约240台。
所以,精锋医疗认为国产腔镜手术机器人大有可为,选择在此赛道深耕。
公司创始人王建辰2011年进入天津大学手术机器人实验室,从事微创手术机器人系统设计与运动控制算法研究。
5年后,赴麻省理工学院进修,掌握了世界先进的单孔手术机器人核心结构设计等技术。
王建辰获得自天津大学—麻省理工学院联合课程取得机械工程博士学位。
另一个为创始人马高博士自天津大学—哈佛大学联合课程取得机械工程博士学位。
2位创始人都有十年手术机器人研究经验,年龄比较年轻,都没超过35岁。
值得注意的是,精锋医疗在2021年就连续完成两轮累计金额接近20亿元人民币的融资——2021年2月,精锋医疗获得由LYFE Capital(济峰资本)和康基医疗(09997.HK)领投,老股东三正健康投资和国策投资联合领投,祥峰投资、博远资本、雅惠投资、老股东保利资本跟投的近6亿元B轮融资。
07精锋医疗专利分析
如此高科技含金量的公司,专利有多少?
目前,精锋医疗在全球共有超过430项获授专利及专利申请。
在中国有201项获授专利,包括76项发明专利、89项实用新型专利及36项外观设计专利,在中国亦有209项专利申请正在审批,在国外(包括欧洲、美国、日本、韩国、巴西及印度等国家)有13项专利合作条约(PCT)国际申请及15项专利申请。
这公司在申报材料里表示,公司中国的专利授权及专利申请数量均在中国手术机器人公司中排名第一。
从专利布局看,精锋医疗当前的专利主要集中于手术机器人、操作设备、操作臂、手术器械、动力机构、驱动装置、末端执行器等相关的核心技术领域。

(与公司的业务经营有重大关系的专利)
08全球手术机器人专利分析
看看全球手术机器人玩家有多少?
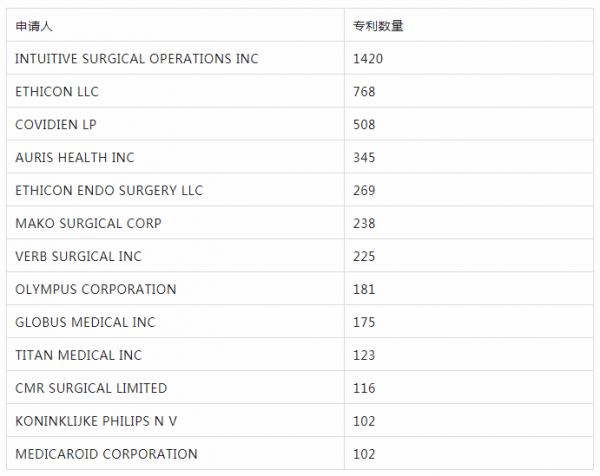
以手术机器人为关键词,在德高行全球专利数据库检索得出,相关专利申请人排名如下:

深圳市精锋医疗科技有限公司排第二,第一的是直观外科手术操作公司。
直观外科手术操作公司就不多说了,达芬奇系列是他家产品。
简单科普2句,IntuitiveSurgical(直觉外科公司)是一家美国的医疗技术公司,开发和制造机器人辅助手术的机器人产品。
它的旗舰产品是一款名为“daVinci(达芬奇)”的机器人系统。
达芬奇已经是一个非常完善的机器人系统,主要用于泌尿和妇科手术。
到2019年底,直觉外科公司已经售出了超过5500台达芬奇机器人系统,帮助了医疗机构进行了超过700万例手术。
直觉外科公司的另一款主打产品是离子机器人系统(Ionroboticsystem),用于机器人辅助支气管镜检查或活检。
公司大量专利也都围绕计算机辅助远程操作手术系统、手术机械臂、图像引导、机械肘、仿真模型、内窥镜、微创切割等专利。
这些专利都在计算机辅助外科学、专门适用于外科的操纵器或机器人这一大概念下。
排名第三的柯惠LP公司(CovidienLp)也是一家美国老牌医疗企业,经营医疗器械。从专利分布看,柯惠公司的专利技术研发重点主要集中在医学诊断与外科领域。
在德高行全球专利数据库里,国外手机机器人专利申请人排名如下:
上表内的都是手术机器人行业的大佬,想抄作业就对准人家公司最新产品去!
知情郎分享几个行业TOP企业的经典专利。
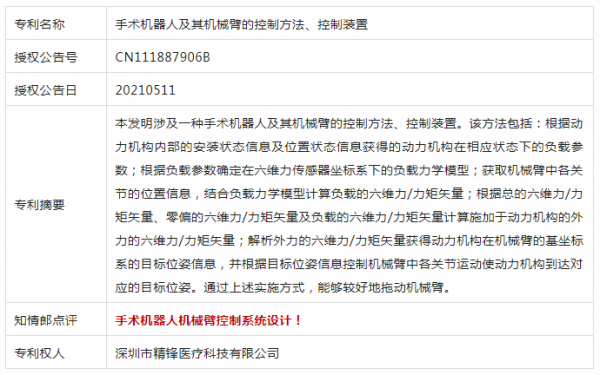
09机械臂控制办法
背景技术
微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。
随着科技的进步,微创手术机器人技术逐渐成熟,并被广泛应用。微创手术机器人通常包括主操作台及从操作设备,主操作台包括手柄,医生通过操作手柄向从操作设备发送控制命令,从操作设备包括机械臂,机械臂远端具有操作臂,操作臂具有末端器械。医生对患者实施手术操作之前,需要拖动机械臂以使其远端能够运动至医生规划的患者手术入口部位的期望位姿。
然而,在拖动机械臂至规划位置时,由受力位置远端的结构导致的负载情况由于具有不确定性,导致不能准确地确定操作者所施加的外力,存在拖动手感与操作者意图差距较大、跟随性较差的问题。
发明内容
基于此,有必要提供一种能够较好地拖动动力机构的手术机器人及其控制方法、计算机可读存储介质。
一方面,本发明提供一种手术机器人中机械臂的控制方法,包括:
根据动力机构内部的安装状态信息及位置状态信息获得的动力机构在相应状态下的负载参数,负载参数包括质量参数和质心参数;
根据负载参数确定在六维力传感器坐标系下、由动力机构导致的负载对应的负载力学模型;
获取机械臂中各关节的位置信息,结合负载力学模型计算负载的六维力/力矩矢量;
获取零偏的六维力/力矩矢量及总的六维力/力矩矢量;
根据总的六维力/力矩矢量、零偏的六维力/力矩矢量及负载的六维力/力矩矢量计算施加于动力机构的外力的六维力/力矩矢量;
解析外力的六维力/力矩矢量获得动力机构在机械臂的基坐标系的目标位姿信息,并根据目标位姿信息控制机械臂中各关节运动使动力机构到达对应的目标位姿。
另一方面,本发明提供一种手术机器人的控制方法,所述手术机器人包括机械臂,所述机械臂具有多个通过关节连接的连杆,作为所述机械臂远端的所述连杆是动力机构。
本发明具有如下有益效果:
通过准确确定受力部件远端结构导致的负载的负载参数,有利于准确确定负载的六维力/力矩矢量,能够准确确定受力部件所受外力的六维力/力矩矢量,进而有助于根据外力精准地对受力部件进行拖动,其拖动手感好、跟随性优良。
10临床力如何被精确测量

背景技术
微创医疗技术旨在减少诊断或外科手术过程中损坏的组织数量,从而减少患者的恢复时间、不适和有害的副作用。使用机器人协助技术的远程操作外科手术系统可以用于克服手动腹腔镜和开放外科手术的局限性。远程呈现系统的进步为外科医生提供患者体内的视野,增加了外科手术器械的运动度的数目,以及远距离外科手术协调的能力。
在手动微创外科手术中,外科医生经由长轴感觉器械与患者的相互作用,这样消除了触感的提示并且掩盖了力提示。在远程操作外科手术系统中,因为外科医生不再直接操纵器械,所以消除了自然力反馈。而是,在长轴的远侧端处的末端执行器通过在轴内延伸的控制电缆致动。
由于末端执行器和患者组织、缝合材料等之间的相互作用,轴内的力传感器可以用于测量在医疗过程中的器械的远侧端处的临床力。但是,由于在轴内延伸的末端执行器控制电缆所施予的外来力,临床力测量可能会引入误差。例如,随着轴绕其纵向轴线滚动时,这种外来力可能由于电缆的扭曲。因此,需要将临床力与外来的机械控制电缆力隔离,以使得临床力可以被精确地测量。
发明内容
在一方面,提供了一种外科手术器械,其包括细长的中空轴,该细长的中空轴包含近侧端部分、远侧端部分以及在近侧端部分和远侧端部分之间延伸的纵向轴中心轴线。
力传感器位于轴的远侧端部分内并且与轴中心轴线同轴。力传感器包含梁以及在梁上的一个或多个应变仪。该梁包含近侧端和远侧端。
近侧锚固件位于轴内并且耦接到梁的近侧端。近侧锚固件包含第一多个电缆导向孔。远侧锚固件位于轴内并耦接至梁的远侧端。远侧锚固件包含与第一多个电缆导向孔纵向对准的第二多个电缆导向孔。
多条电缆延伸穿过轴、穿过第一多个电缆导向孔以及穿过第二多个电缆导向孔。随着轴围绕轴中心轴线滚动时,第一多个电缆导向孔和第二多个电缆导向孔约束多条电缆以保持其平行于轴中心轴线。
在另一方面,提供了一种外科手术器械,其包括细长的中空轴,该细长的中空轴具有纵向中心轴线并且包括限定中心孔洞的内壁。多条电缆在中心孔洞内延伸。力传感器包括在在中心孔洞内的梁并且包括在梁上的一个或多个应变仪。近侧锚固件在中心孔洞内与轴的内壁接触且与梁的近侧端部分接触。远侧锚固件在中心孔洞内且与梁的远侧端部分接触。电缆导向件在中心孔洞内,以沿着梁的边约束多条电缆的部分以平行于中心轴线移动。
通过确保控制电缆在围绕轴中心轴线的所有轴滚动方位处保持平行于力传感器梁,当器械处于使用中时,在电缆上致动器械的远侧端部件的力不会影响力传感器梁上的横向力。
以这种方式,由传感器梁上的力感应元件感应到的传感器梁上的横向力有效地限于与在手术部位处的组织和物体相互作用的器械的远侧端部件相关联的临床力。
结果,力传感器梁上的力传感器可以精确地感应这些临床力,并继而将感应到的临床力传送给计算机处理器,该计算机处理器继而经由用户输入设备将感应到的力作为器械远侧端处的临床力的精确触觉表现输出到操作用户输入设备的外科医生的手中。
呈现以上描述是为了使本领域的任何技术人员能够创建和使用具有电缆导向件的外科手术器械,以将在器械轴内延伸的控制电缆与设置在该轴内的传感器梁平行地对准,以防止垂直的电缆力赋予到传感器。


