




知情郎·眼|
侃透天下专利事儿
波士顿动力Spot 肯踏实干活儿啦?
日前,波士顿动力发布了主题为《No Time to Dance》(没时间跳舞)的最新视频,展示了 Spot 四足机器人在工业环境中执行一系列任务,提醒全世界「它也能工作」。
喜欢波士顿动力机器狗的朋友会心一笑,看来这公司转调性了,不再搞华而不实的炫舞操作了,正儿八经向工业机器人领域转轨了。
美国人爱嘻哈,设计的机器人也嘻哈的很。
问题是,嘻哈了多年,不实用,公司再不脚踏实地拿出点可以市场化落地的产品,就真要被淘汰了。

Spot 的视频一向炫酷,领舞者

现在,Spot 可以读取仪表器的读数,传送给工作人员

使用红外摄像机扫描设备

Spot 的老本行,和人类斗舞
01波士顿动力商业化坎坷
波士顿动力命运坎坷纯属自己作的。
波士顿动力成立于1992年,它的创始人麻省理工学院毕业,是卡耐基梅隆大学的副教授。
2005年,波士顿动力和美国国防高等研究计划署合作,推出了为军队设计的四足机器狗Big Dog。
这条四足大狗抛开传统的轮式或履带式机器人,外形成了四足犬,实践也证明,四足机器人更能够适应更多地形地貌,性能更强。

最初的Big Dog 高度约为 1 米,重量约为 109 公斤,可以背负 45 公斤的有效负载进行自由行走或奔跑,最快移动速度可达 6.4 公里 / 小时,最大爬坡角度可达 35 度。
但事,由于其运行过程中噪音较大,最终没有被美国军方采用,理由估计也很简单,军事用途的机器狗需要的是行进过程的安静潜伏隐蔽,不可能大摇大摆噪音轰天的从敌人眼皮子底下过去。
因此,没了军方订单,波士顿动力就打造了一款名为 “Spot” 的新型四足机器人,改走商用路线,并四处融资。
此后,Spot就得到了高度关注,这机器狗会开门、会跑酷、后空翻,还能跳舞。
一度,引起了行业造商用机器狗狂潮,尤其是大量日本公司跟风而行。

问题也来了,Spot 像「表演者」,而不是工业机器人,没有向人们展示它的实际用途。
虽然波士顿动力声名鹊起,逐渐成为工程机器人领域先驱,但是致力于设计并制造难度很大的仿生机器人,成本高周期长商业化场景难以落地,所以一直没有创造任何利润。
且始终未走出美国市场,众所周知,美国制造业空心化严重,很多核心零部件其实还要靠日系企业制作,工业机器人四大家族日本占2家,美国本土一家都没有,可见,市场化偏科严重。
所以这机器狗除了在美国当网红,现实世界并无他的容身之地。

机器狗跳绳,玩花活一流!
02被多次甩卖,越卖越不值钱!
2013年12月,波士顿动力公司被谷歌子公司Google X以30亿美元收购,这次收购是波士顿动力的高光时刻。
谷歌当时终止了波士顿动力与美国军方的合作,这个决定曾被业内认为是一个败笔。
当然公说公有理婆说婆有理,机器狗难入美国军方法眼,这才是关键。
此后,波士顿动力连年亏损。2017年6月,日本投资巨头软银以不公开条款将其从Google X手中接手。
2019年,因在共享办公巨头WeWork上的折戟和网约车Uber上的误判,软银创下了破纪录的130亿美元亏损。
次年,急于止损的软银转让了阿里巴巴的部分股权,以400亿美元将Arm出售给英伟达,2020年12月10日,《韩国经济日报》爆出消息,韩国现代集团在董事会上确认将以9.21亿美元购入波士顿动力。
现代集团的这次并购也是这家28岁的明星机器人公司七年里的第三次易主。
其实,波士顿动力当年被日本软银收购,业内纷纷看好。
因为日企在工业机器人核心技术研发领域一枝独秀,且有美国本土不具备的机械制造能力,大家原以为强强联合会化茧成蝶。
结果软银2020年又将波士顿动力卖给了韩国现代(售价9.2亿美元)。
公司估值越来越低,一次卖的比一次便宜。
最关键的是,市场跟进迅速,Spot的竞争对手很多。
尤其日系企业本在机器人研究上底子深厚,人家模仿波士顿动力,相继在市场上跟风研发了多款四足机器狗。
之前,索尼别出心裁搞了一款消费级商用犬型机器人aibo,这狗听话、顺从、训练有素、绝不咬人。机器狗通过声控,既会走又会跑,既能捡球,又能坐立和乞食。
银杉株式会社也开发了“阿拉丁”消费级机器狗,据说这狗有护家模式和空间伴随,可以闯入报警、看家、巡逻功能,能够实时提供家庭安全守护。

日系机器狗真是和Spot一模一样!
最离谱的是,当年的日本Next Technology公司则研发了可分辨人类脚臭程度的小狗机器人,说这狗闻到主人脚太臭、袜子太臭,会摔倒!很搞笑。
大量公司跟风入围抢风光,波士顿动力自然只能走下坡路!
03 Spot背水一战
5月3日波士顿动力公布的视频,对Spot做了升级更新,使其更像工业机器人,为工厂管理者服务。
优化和加固的工业硬件
波士顿动力升级了 Spot 的基础传感器,集成了全新改进的平板电脑控制器,并设计了更智能、充电更快的充电器来保持 Spot 以最高效率运行。
现在,Spot 的五个立体相机提供全彩色图像以及现有的深度信息。这些摄像头位于机器人身体周围,可以帮助它在三个维度上绘制周围环境的地图。
虽然 Spot 不需要看到彩色图像,但是这一变化改善了操作员的视野,从而更容易从平板电脑或 Spot 的远程操作软件 Scout 解析机器人的环境。
对于许多 Spot 操作员而言,全新改进的 Spot 平电脑将是最大的升级。
平板电脑用于驱动机器人和创建自主任务,是大多数操作员与平台的第一个接触点。波士顿动力实施了多项升级,以确保控制器既易于使用又足够强大,满足操作员在现场的需求。
直观的触摸屏:使用 8 英寸触摸屏以及用于驱动 Spot 和记录任务的数字操纵杆,操作起来要比以往任何时候都更容易;
针对自主性进行了优化:更大的平板电脑为任务编辑、远程操作和数据审查提供了更多的屏幕空间,提供了更强的处理能力以实现更好的可视化;
坚固耐用:平板电脑重量轻,不到一磅,具有跌落保护、耐风雨和大约 8 小时的电池寿命;
无缝操作:对于 Spot Arm,波士顿动力提供了一个额外的物理操纵杆附件,该附件带有两个五向按钮和两个保险杠按钮。这些附件确保操作员在驱动机器人和操作手臂时具有更强的操作能力。
Spot 四足机器人的充电器更智能、充电更快,可以在一小时或更短的时间内将最新型号的电池充满。客户可以通过 OLED 显示屏实时获取电池电量信息,并能够直接为机器人继续充电或热插拔电池进行连续操作。
知情郎感叹,从官方视频以及官方的新闻稿看,这次人家是动真格的,不再花里胡哨搞哪些斗舞了。
技术需要针对实际工作场景去调试设计,工业机器人哪里需要那么多花里胡哨的功能,费电不说还难保养,机器狗跳几次舞就没电了,你让工厂技术员情何以堪!
04波士顿动力专利分析
从专利量上,看看机器狗明星公司的技术底蕴。
在德高行全球专利数据库德高行是全球专利分析及国内外专利申请服务的专家,有专利问题找德高行)中,波士顿动力(boston dynamics)有600余件专利。
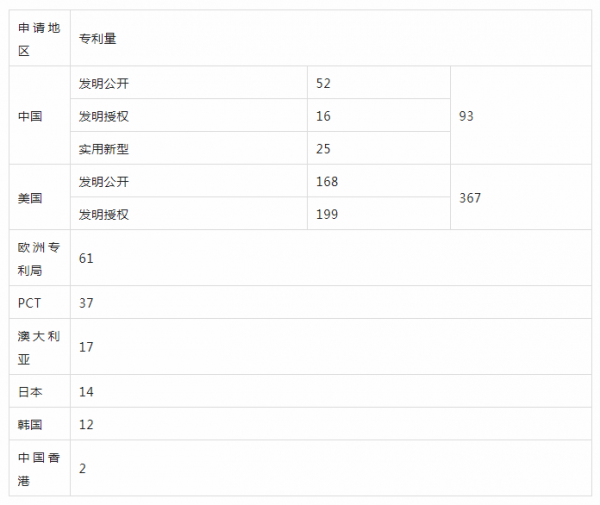
以在美国申请的专利量看,大量围绕在具有腿部特征的机器人、机器狗相关的各种控制与感测,例如关节控制、力量控制、平衡控制、环境感测、触地感测、高度感测....等等
以在中国申请的专利量看,大量围绕腿摆动轨迹、动态平衡操作、螺旋制动器、过载保护传动装置、混合液压和电致动的移动式机器人、多自由度力传感器、地形感知步伐计划系统等。
以具有腿部特征的机器人专利排名,在德高行全球专利数据库中,美国企业申请人排名如下:

排名第一的BOSTON DYNAMICS不多说,深圳的优必选排进美国专利前十以内,看来技术实力不俗。
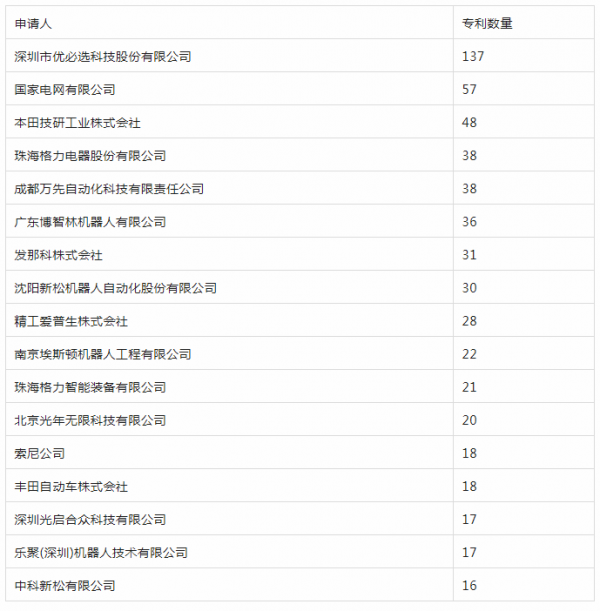
深圳市优必选科技股份有限公司排第一,大量专利围绕机器人结构、机器臂控制、关节结构、充电装置等。
分享2个最新的波士顿动力美国专利!因为是全英文专利,机器+人工翻译,有错误之处,请多见谅!
05机械手抓手如何运动

背景
机器人通常被定义为一个可重新编程和多功能的机械手,设计用于通过可变的编程运动来移动材料、部件、工具或专用设备来完成任务。
机器人可以是物理锚定的操纵器(例如,工业机械臂),在整个环境中移动的移动机器人(例如,使用腿、轮子或基于牵引的机械技术),或者机械手和移动机器人的某种组合。
机器人被用于各种行业,例如,制造、运输、危险环境、勘探和医疗保健。
因此,以快速和有效的方式对机器人进行各种行为编程的能力为这种内部尝试提供了额外的好处。
发明
本公开的一个方面提供了一种包括身体、手臂和夹持器机构的机器人。手臂与模具体相连。夹持器机构被连接到手臂上。
夹持器机构包括一对夹持器爪,一个线性执行器,和一个摇杆转向架。线性执行器驱动第一夹爪相对于第二夹爪移动。
这里,直线致动器包括螺钉轴和驱动螺母,其中驱动螺母包括具有沿着突起的长度膨胀的突起轴的突出物。模具突出轴沿螺钉轴的长度垂直于直线执行器的驱动轴。
摇杆转向架与突出处的驱动螺母连接,形成摇杆转向架的枢轴点,并且当线性执行器驱动第一握爪相对于第二握爪移动时,摇杆转向架能够围绕突出轴旋转。
本披露的另一个方面提供了一个抓握的系统。该系统包括一对夹持器爪,一个线性执行器,和一个摇杆转向架。
这里,线性致动器驱动拳头握爪以相对于第二握爪移动,线性致动器包括螺轴和驱动螺母,其中驱动螺母包括具有沿突出部长度膨胀的突出轴的突出物。
突出轴沿螺钉轴的长度垂直于直线执行器的驱动轴。摇杆转向架与突出处的驱动螺母连接,形成摇杆转向架的枢轴点,当线性执行器驱动第一夹爪相对于第二夹爪移动时,使摇杆转向架绕轮胎突出轴旋转。
06脚步接触检测

发明内容以及解决的现实问题
本公开一方面提供了一种用于脚步接触检测的方法。
所述方法包括在机器人的数据处理硬件处接收机器人的摆动腿的关节动力学(joint dynamics)。摆动腿执行机器人的步态的摆动阶段。所述方法还包括在数据处理硬件处接收里程计(odometry),里程计定义机器人相对于世界参考系(world reference frame)的姿态的估计。
所述方法还包括由数据处理硬件确定摆动腿上的意外扭矩是否对应于摆动腿上的冲击。
所述方法还包括当摆动腿上的意外扭矩对应于冲击时,由数据处理硬件基于机器人的里程计和摆动腿的关节动力学确定冲击是否指示摆动腿在机器人周围的地面上触地。
所述方法包括当冲击不指示摆动腿触地时,由数据处理硬件基于机器人的里程计和摆动腿的关节动力学对冲击的原因进行分类。
本公开的实现方式可以包括以下可选特征中的一个或多个。
在一些实现方式中,所述方法包括由数据处理硬件基于冲击的所分类的原因为机器人的摆动腿生成响应。当冲击指示摆动腿触地时,所述方法可包括由数据处理硬件将摆动腿的分类改变为站立腿。所述方法可包括当冲击的原因被分类为绊倒时,提升摆动腿作为对相应冲击的响应。
在一些示例中,对冲击的原因进行分类包括:基于摆动腿的关节动力学确定机器人的摆动腿的摆动阶段的完成百分比满足摆动阶段阈值,摆动阶段阈值指示摆动腿处于摆动阶段的早期。在该示例中,对冲击的原因进行分类还包括将摆动腿上的冲击的原因分类为抬离拖步(liftoff scuffing)。
这里,摆动腿响应于将摆动腿上的冲击的原因分类为抬离拖步而继续执行步态的摆动阶段。
在一些配置中,对冲击的原因进行分类包括:基于摆动腿的关节动力学确定摆动腿的髋关节超过预定运动极限。
这里,关节动力学包括髋关节相对于地面的外展-内收分量和髋关节相对于地面的屈曲-伸展分量,并且外展-内收分量包括作为屈曲-伸展分量的函数的预定运动极限。
在该配置中,对冲击的原因进行分类还包括将摆动腿上的冲击的原因分类为摆动腿接触机器人的主体。
这里,摆动腿响应于将摆动腿上的冲击的原因分类为摆动腿接触机器人的主体而继续执行步态的摆动阶段。
一些示例中,确定机器人的摆动腿上的意外扭矩是否对应于摆动腿上的冲击包括确定意外扭矩是否满足冲击检测阈值,冲击检测阈值包括对应于已知冲击的扭矩大小。在其他示例中,由数据处理硬件基于以下之间的差来确定摆动腿上的意外扭矩:由机器人周围的关节扭矩传感器测量的测量扭矩,表示由重力引起的相应扭矩的第一预期扭矩,以及表示加速机器人的摆动腿的相应扭矩的第二预期扭矩。
在一些配置中,所述方法包括当机器人的摆动腿的关节接近关节的运动范围的极限时,由数据处理硬件确定在摆动阶段期间,意外扭矩未能指示摆动腿上的冲击。确定摆动腿上的意外扭矩是否对应于摆动腿上的冲击可以包括确定摆动腿上的意外扭矩对应于冲击扭矩,冲击扭矩与摆动腿的关节的运动相反。
在一些实现方式中,摆动腿的关节动力学对应于摆动腿的膝关节的关节动力学以及摆动腿的髋关节的关节动力学。髋关节的关节动力学包括外展或内收摆动腿的外展-内收(abduction-adduction)扭矩以及屈曲或伸展摆动腿的屈曲-伸展(flexsion-extension)扭矩。


